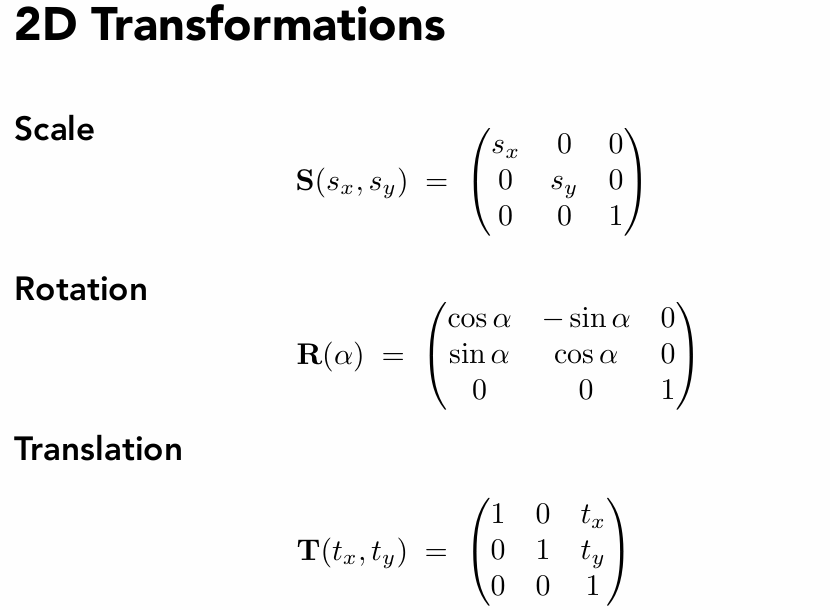
二维矩阵变换
缩放变换(Scaling)
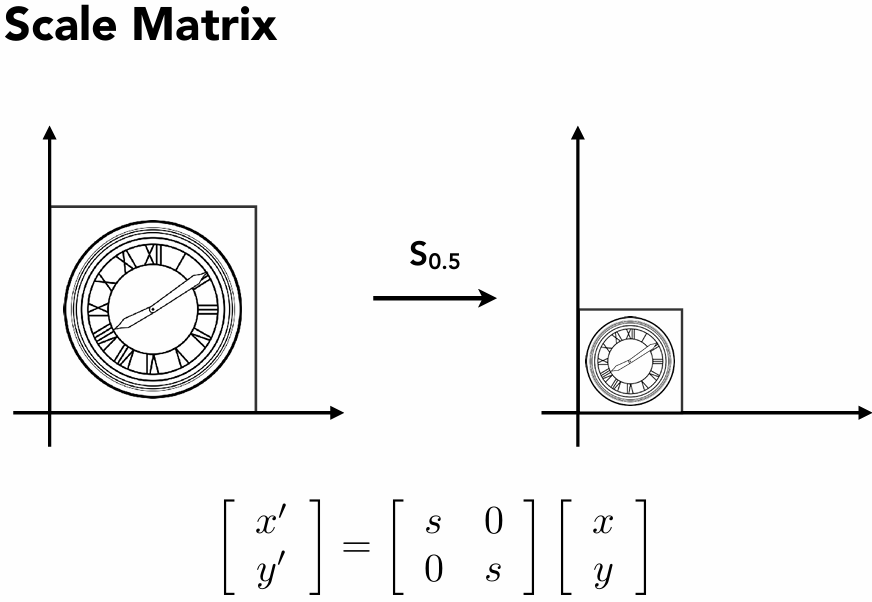
均匀缩放
将矩阵进行缩放,例如将一个矩阵大小均匀缩放变成原来的一半
那么,我们记这个过程为 S0.5 可以写作:
[x′y′]=[s,00,s][xy]
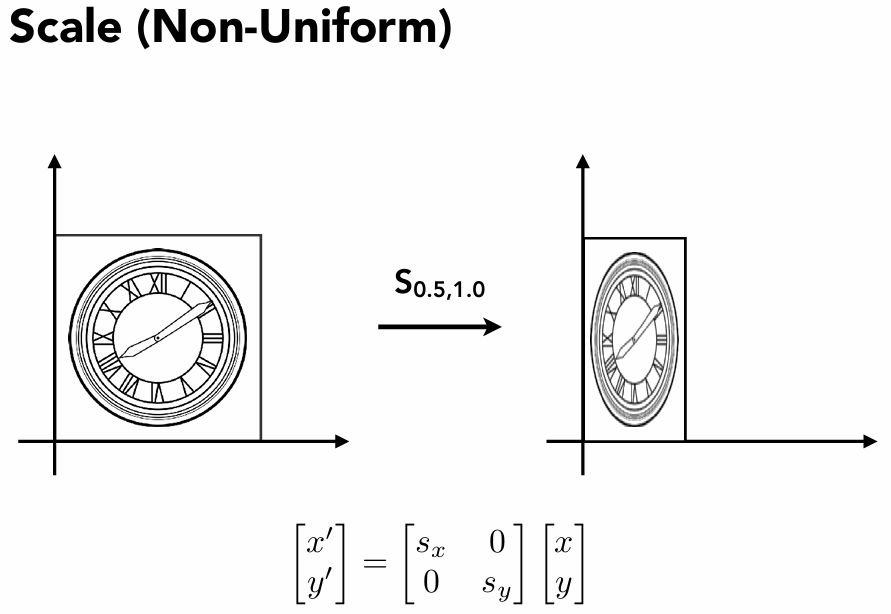
不均匀缩放
现在缩放不均匀,比如x缩放0.5.y不缩放,也就是y不变,x变为0.5非均匀缩放
其实也一样,我们记这个过程为 S0.5,1.0 可以写作:
[x′y′]=[sx,00,sy][xy]
很简单,没什么好说的
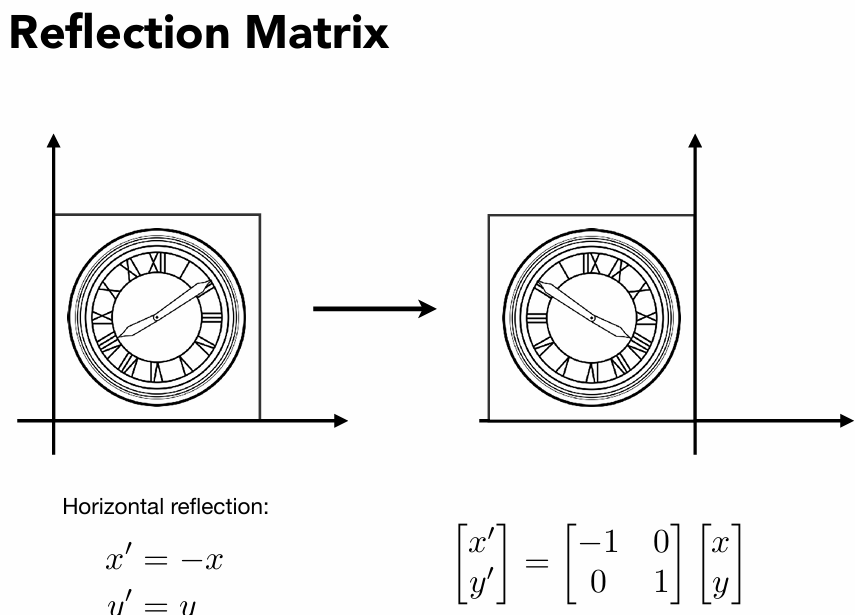
反射变换(Reflection)
关于某条直线的镜像。
- 关于 x 轴反射:[100−1]
关于 y=x 反射:[0110]
变换也可也写作:
[x′y′]=[−1(0),0(1)0(−1),1(0)][xy]
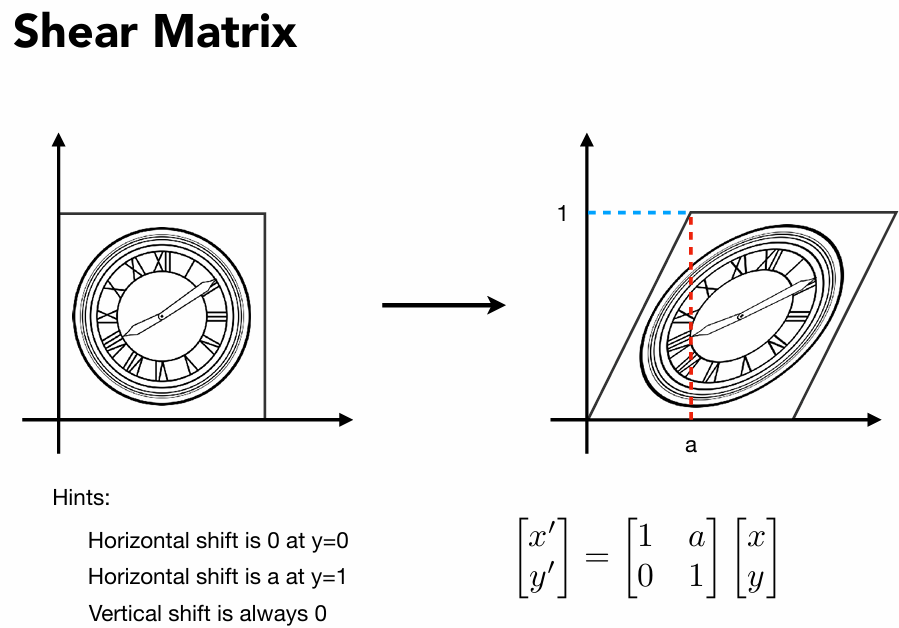
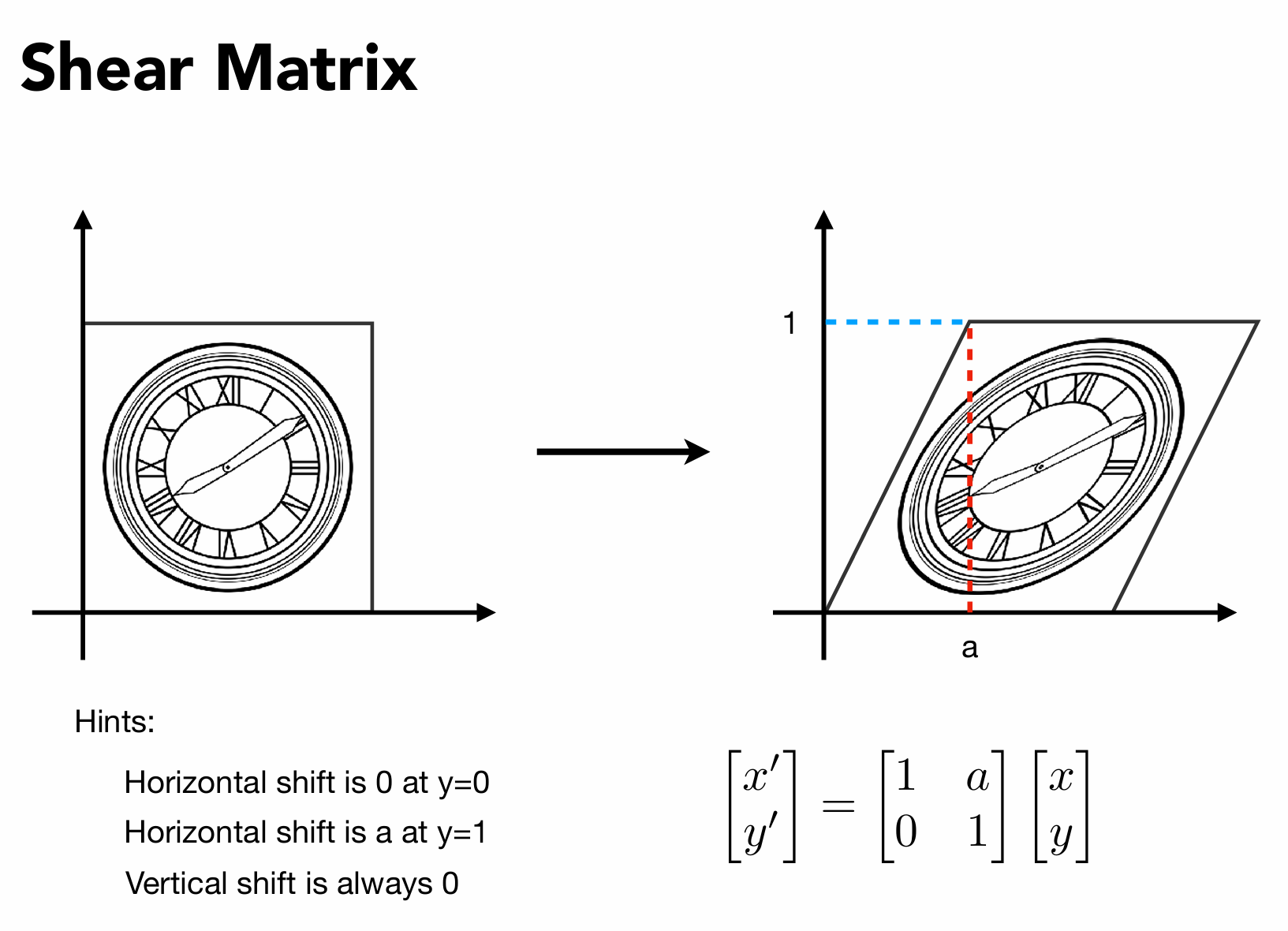
剪切变换(Shear)
简而言之就是沿某方向拉伸。
按照下图所示,上边的每个点向右移动a个单位,竖直(y)不动,下边不动,那就是水平方向的一个切变
[x′y′]=[1,a0,1][xy]
要找关系,找变化前x,y和变化后x’,y’两者之间关系
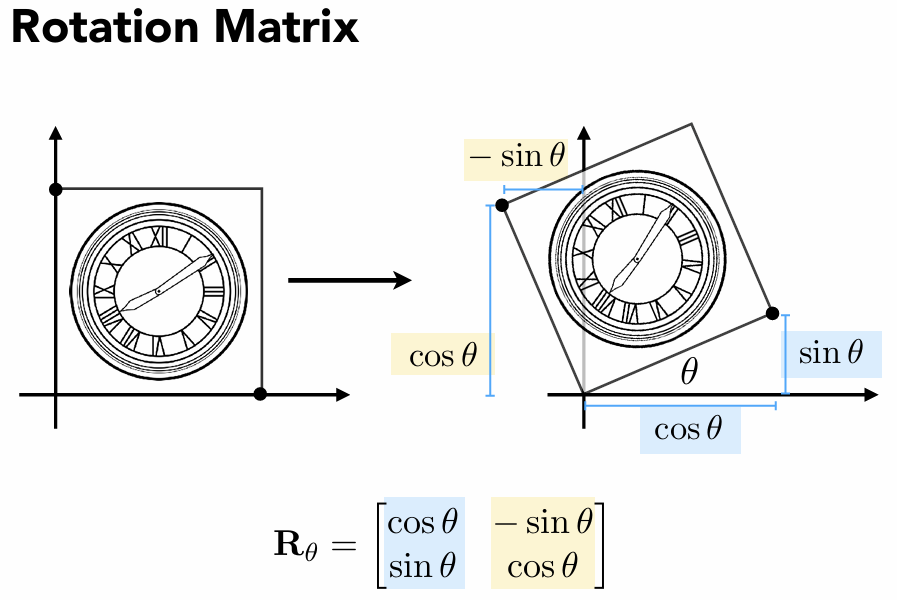
旋转变换(Rotation)
默认规定:
- 不说明下,说旋转默认绕原点旋转
- 不说明下,说旋转默认绕逆时针旋转
例如:将矩阵旋转 θ,则矩阵绕原点逆时针旋转 θ,这个过程可以记作
Rθ=[cosθ,−sinθsinθ,cosθ]
[x′y′]=[cosθ,−sinθsinθ,cosθ][xy]
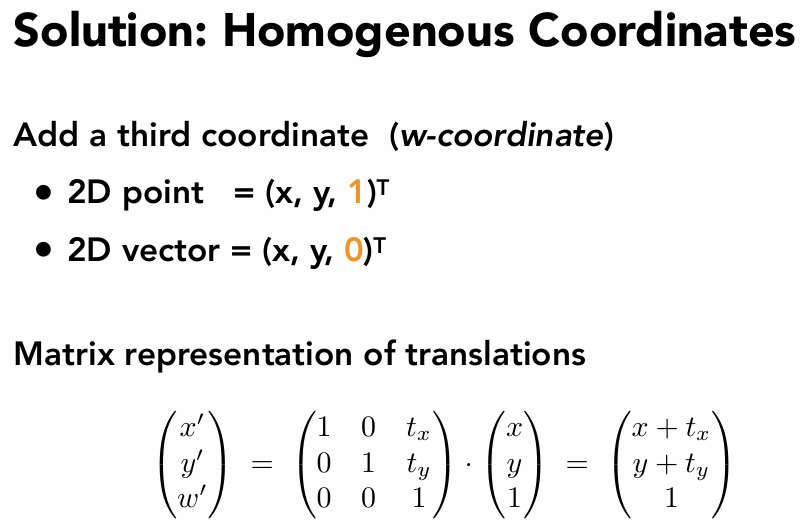
齐次坐标与平移变换
平移变换(Translation)
引入齐次坐标(Homogeneous Coordinates),将平移表示为线性运算
例如:假设将矩阵沿x轴平移 tx ,沿y轴平移 ty
如果不使用齐次坐标,采用上面的二维形式,只能写成
[x′y′]=[a,bc,d][xy]+[txty](若单纯平移,则矩阵abcd为单位矩阵)
不能表示为线性变换,为了统一简单的方法,避免平移变换当作特殊去处理
这时候需要进行降维打击!(bushi),给二维坐标新添加一个维度!
将二维点(Point)表示为 (x,y,1)T 二维向量(Vector)表示为 (x,y,0)T
就可以看到如下图:
就可以将平移表示为线性运算
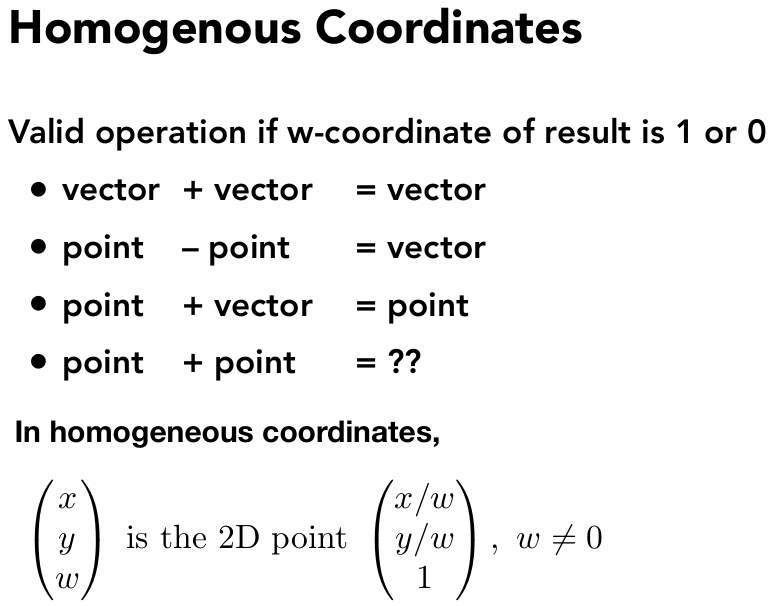
以下是为什么定义点为1向量为0:
最底下公式可以得知,点+点之后的结果由齐次坐标表示的是点与点间的中点
很好理解,两个点相加得到的w=2,转换成2D点除掉w后就是对应坐标相加/2了,就是中点
齐次坐标表示变换:
⎝⎜⎛x′y′1⎠⎟⎞=⎝⎜⎛a,b,tXc,d,ty0,0,1⎠⎟⎞⎝⎜⎛xy1⎠⎟⎞
观察会发现矩阵最后一行都是001,平移写在最后一列的前两行上。其余二维线性变换写在左上角的2*2上
用齐次坐标表示线性变换
最后可以得出以下
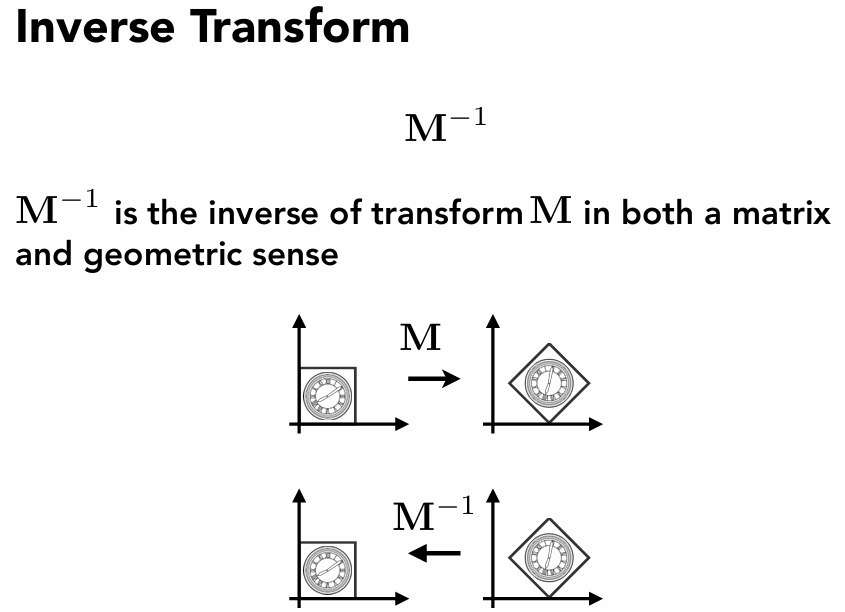
逆变换
很简单,就是变回去(
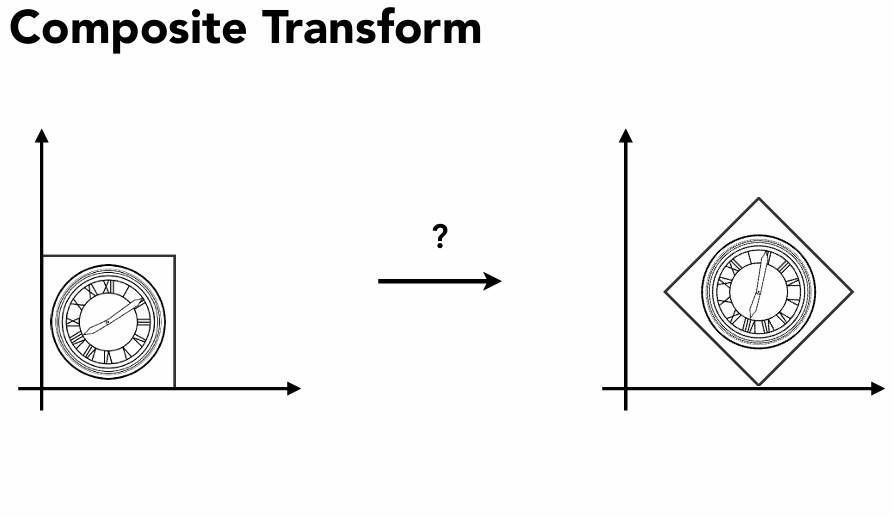
复合变换
复合变换的初步细节
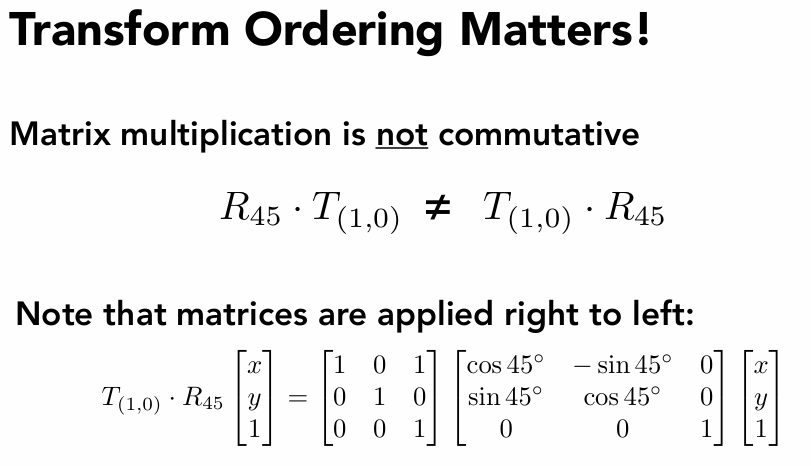
多个变换可通过矩阵乘法组合,但顺序不可交换。例如,先旋转后平移 ≠ 先平移后旋转。
例如以下变换:
思考:如何从左变换到右侧状态
是先平移再旋转?还是先旋转再平移?
先思考,思考完毕之后再看答案
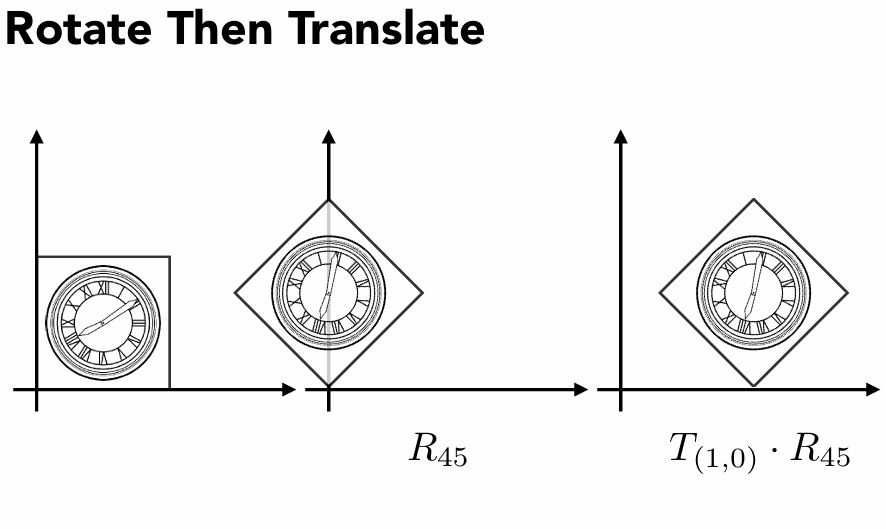
答案:
先旋转再平移
我们上面说了:
1. 先旋转后平移 ≠ 先平移后旋转
2. 不说明下,说旋转默认绕原点旋转
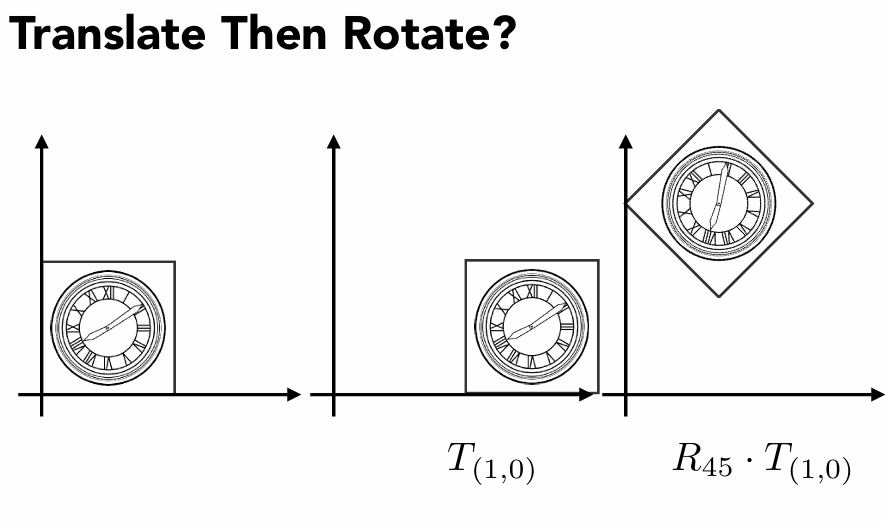
所以会有两种情况:
- 先平移再旋转 R45⋅T(1,0)
- 先旋转再平移 T(1,0)⋅R45
矩阵复合变换的小公式
先旋转再平移:
T(1,0)⋅R45⋅⎣⎢⎡xy1⎦⎥⎤=⎣⎢⎡1,0,10,1,00,0,1⎦⎥⎤⎣⎢⎡cosθ,−sinθ,0sinθ,cosθ,00,0,1⎦⎥⎤⎣⎢⎡xy1⎦⎥⎤
在式子左侧,会发现越先操作的变换越靠近 ⎣⎢⎡xy1⎦⎥⎤ ,从右到左去一个一个应用变换
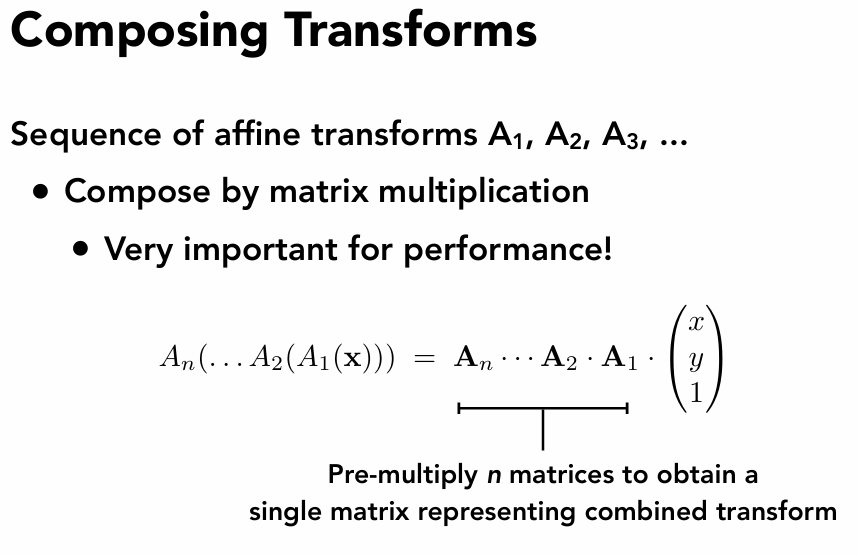
推广
我们可以先把前面的变换都乘到一块吗,都变成一个矩阵再去乘我们原始的向量
变换分解
先看图:
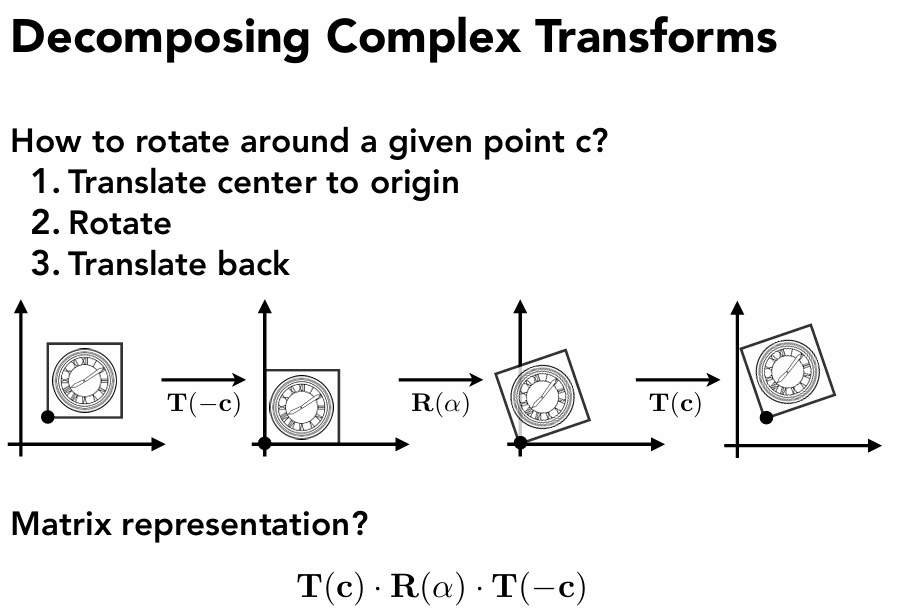
我们要实现矩阵绕着点C进行旋转,而非受限与原点旋转。
很简单,先把矩阵平移会到原点上去,再旋转,再平移回去,这样就把绕C旋转这个变换分解成了三个基础变换
T(c)⋅R(a)⋅T(−c)
浅谈三维变换
基础部分
三维也有基础变换!
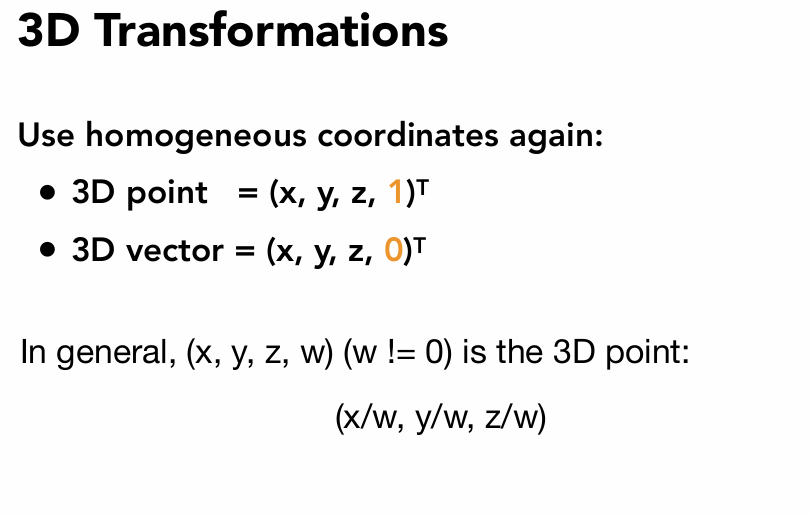
为了保证线性运算,使用齐次坐标,依旧要降维打击
三维点齐次坐标 :(x,y,z,1)T ; 三维向量齐次坐标 :(x,y,z,0)T
同二维一样
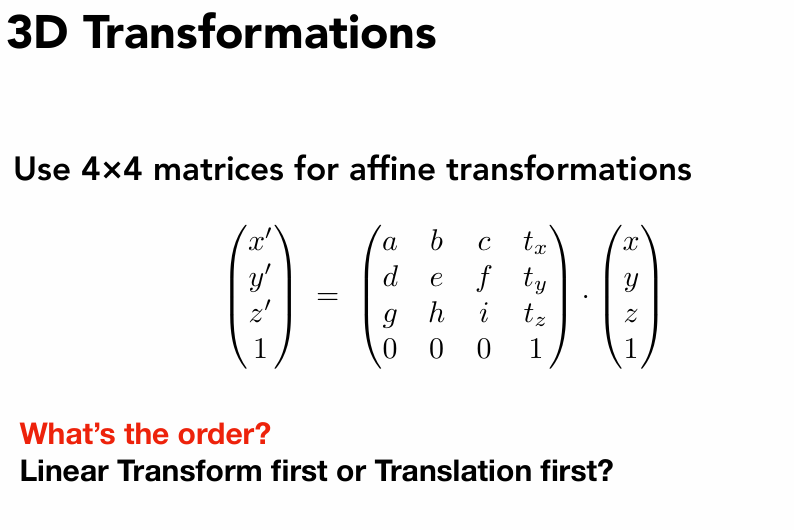
齐次坐标表示变换
一样的啦!
左上角3*3的区域就是三维变换的基础线性变换,右侧最后一列的 tx,ty,tz 表示的是平移,最后一列还是0001
⎣⎢⎢⎢⎡x′y′z′1⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡a,b,c,txd,e,f,tyg,h,i,tz0,0,0,1⎦⎥⎥⎥⎤⎣⎢⎢⎢⎡xyz1⎦⎥⎥⎥⎤
ArisuMika
关注Arisu喵!关注Arisu谢谢喵!